
Pololu Motoron M1T550 Single I²C Motor Controller
The Pololu Motoron M1T550 Single I²C Motor Controller offers a compact solution for controlling one DC motor using an I²C interface.
Multiple Motoron controllers can be connected to the same I²C bus, making it easy to expand a system with additional motors. The M1T550 supports motor supply voltages from 1.8V to 22V and can deliver continuous output currents up to 1.8A.
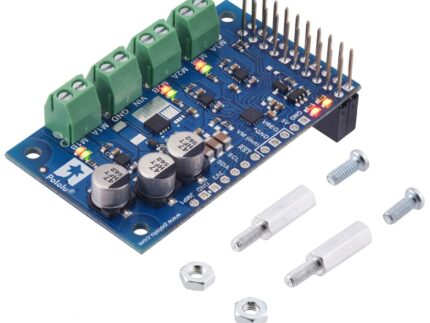
Available with or without pre-soldered headers – select the required version before adding to your cart. The unsoldered version comes with a loose 12×1 header strip.
The Motoron M1T550 and M1U550 controllers make it easy to control a single bidirectional, brushed DC motor using an I²C or TTL serial (UART) interface, respectively. These compact (0.6″ × 0.6″) boards support motor supply voltages from 1.8 V to 22 V and can deliver continuous output currents up to 1.8 A. Multiple Motoron controllers can be configured to work on a single I²C or serial bus, allowing independent control of many motors. Unlike most of our motor drivers, the Motoron does not require any PWM outputs or timers on your microcontroller. Instead, only a single I²C or UART interface is needed regardless of how many Motorons you connect.
These Motoron controllers are available in several versions with different combinations of communication interfaces and connector options:
- M1T550 (I²C) (this item):
- headers soldered
- headers included but not soldered in
-
M1U550 (TTL serial):
- headers soldered
- headers included but not soldered in
For dual-channel alternatives, consider the Motoron M2T550 and M2U550.
Connection Example
Features
- One motor control channel allows for control of one bidirectional brushed DC motor per Motoron
- Wide motor supply voltage range: 1.8 V to 22 V (absolute maximum)
- Maximum output current per motor: 1.8 A continuous, 5 A peak for <1 second
- Reverse-voltage protection on motor power supply (down to −20 V)
- Logic voltage range: 3.0 V to 4.9 V (5V nominal not recommended)
- Control interface: M1T550: I²C (up to 400 kHz)
- Optional cyclic redundancy checking (CRC)
- Configurable motion parameters:
- Max acceleration/deceleration forward/reverse
- Starting speed forward/reverse
- Direction change delay forward/reverse
- PWM frequency: eight options available from 1 kHz to 80 kHz
- Command timeout feature stops the motor if the Motoron stops receiving commands
- Configurable automatic error response
- Motor power supply (VIN) voltage measurement
- Two status LEDs
- Motor direction indicator LEDs
- Error output for easier detection of error conditions
- Motoron Arduino library simplifies using the Motoron with an Arduino or compatible controller
- Motoron Python library simplifies using the Motoron with Python or MicroPython
- Comprehensive user’s guide
- Compact 0.6″ × 0.6″ size
Specifications
| Channels | 1 |
| Model | Motoron M1T550 |
| Control interface | I²C |
| Minimum operating voltage | 1.8 V |
| Maximum operating voltage | 22 V |
| Continuous output current per channel | 1.8 A |
| Peak output current per channel | 5A |
| Minimum logic voltage | 3.0 V |
| Maximum logic voltage | 4.9 V |
| Reverse voltage protection? | Y |
| Size | 0.6″ × 0.6″ |
| Weight | 1.9 g |
Resources
- User Guide
- Arduino Library
- Python/MicroPython library
- Dimensions
- 3D Model
- Drill Guide
Package Contents
- 1x Motoron M1T550 Single I²C Motor Controller (with/without pre-soldered headers – select an option before adding to your cart)
- 1x 12-pin header (included with unsoldered version only)